HELL’S HORSES,
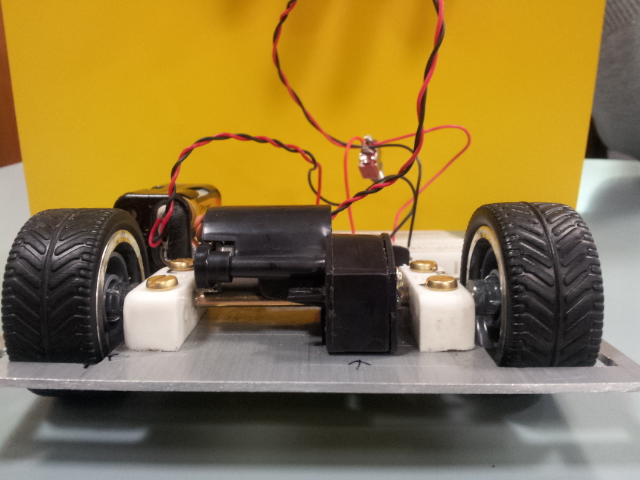
Things seem to be going good so far in with team C.A.K.E. In class last Friday morning we managed to get a racer doing some test runs on the table and I’m glad to announce they were successful………..sort of. While we did get the machine running, a few problems did crop up, but this is a good thing a it can only lead to improvements! First of all, my front axle wasn’t exactly level so this led to C.A.K.E. taking the long way around the table. Since it was unbalanced only one wheel was driving the whole robot so it would head right when ever we ran it. The next issue was the questionable durability of the breadboards and their ability to survive a knock without having half of the wires falling out of the holes. Stall current with the motors also posed a serious threat to the project as the voltage would drop considerably causing the PIC and driver chip to reset, boo! On top of all these problems, two breadboards and a rake of wires looks a bit sh*t if you ask me.

But after a quick meeting today, it looks as though all of these issues have been dealt with.
To overcome the wires coming out of the breadboard, the decision to transfer our circuit onto a more permanent board was taken. Chris and I began this task in class on Friday and Gian did a sweet job of finishing it off for us at home during the weekend. This has led to a smaller and more secure board which should help with mounting issue. The problem with the stall current was figured out by Gian(SOUND BUD!), but I think we are going to keep that piece a secret for now.
To fix the issue of the axle, I scraped the two brackets I was using and managed to use the pre drilled holes in two new ones as these would be lot more in line than the ones I previously drilled. This worked a treat and now the front wheels spin a lot more freely and she runs straight as well.
With all these problems fixed, code written and cleaned up by Chris I thought that a lick of paint would tidy things up a lot. Inspiration came from the likes of this,

The first job was to remove all the part from the chassis, give it a quick sanding and a clean with some white spirits just to get rid of any dirt or grease, I managed to fill the big hole in the middle with some body fillers as well just to neaten it up.

A quick coat of primer to help the paint set and a blast of spray paint later and voila! Gave the brackets a spray too, just to get rid of the plastic look.




According to my maths the white stripe down the middle will increase the speed overall “whitestripe = speedx2”, so it made perfect sense to do this. Anyway, looking forward to getting everything mounted up and ready to go for the race. Best of luck everyone!